Reliable inspection of resident space objects requires trajectories that maximize sensing quality while respecting the stringent propellant and safety constraints of small inspector satellites. While prior work has explored trajectory planning for such missions, most approaches optimize the vehicle's translational path first and treat attitude control as a secondary consideration. This decoupling can be suboptimal when sensor pointing strongly influences the quality of information collected.
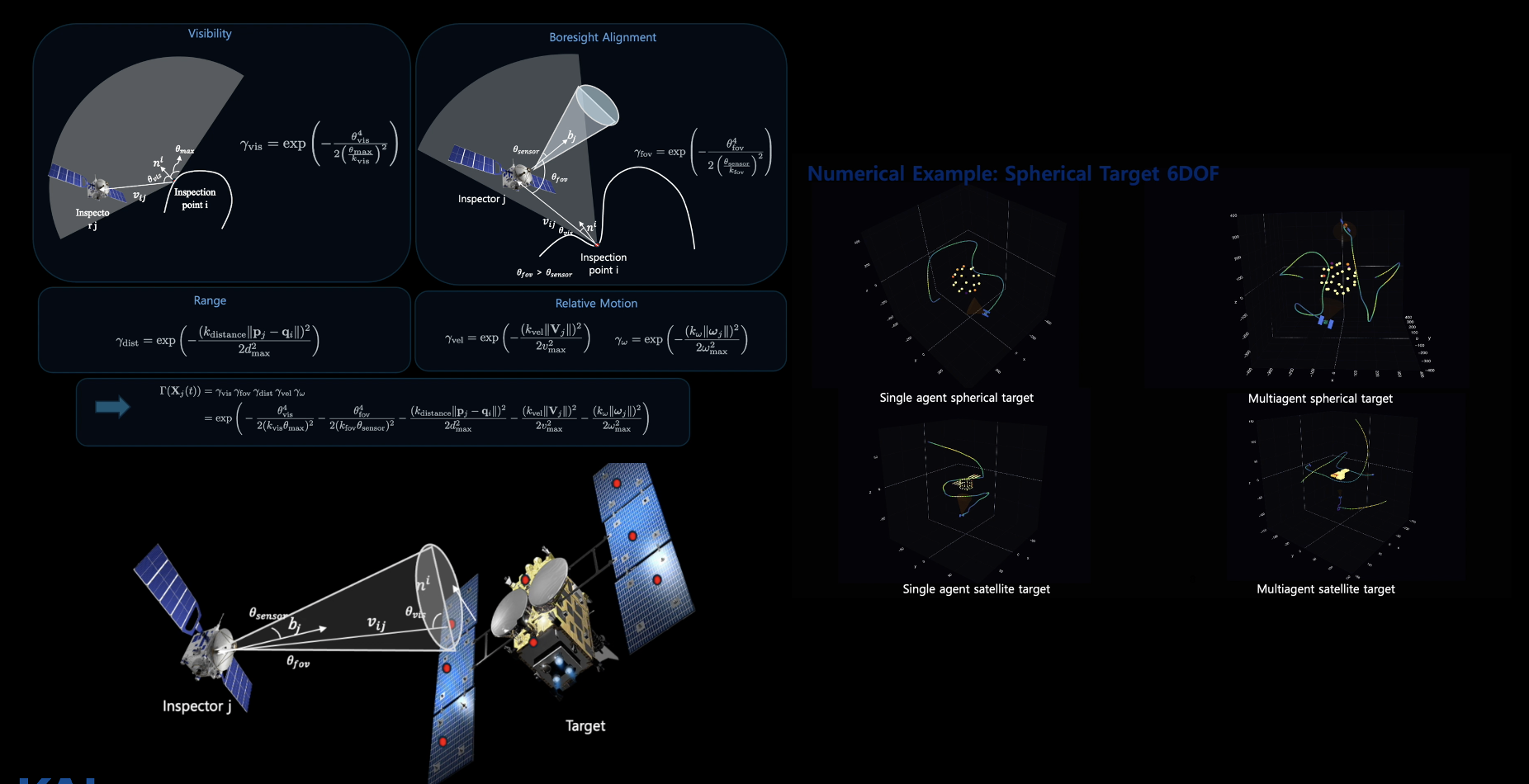
We formulate multi-spacecraft inspection as a multiphase six-degree-of-freedom (6-DOF) optimal control problem that simultaneously optimizes each inspector's translation and attitude trajectories. A differentiable visibility metric—incorporating surface-normal alignment, field-of-view constraints, range attenuation, and motion penalties—serves as a proxy for observation quality within the optimizer. Numerical simulations with up to three inspectors and up to 50 inspection points demonstrate that the algorithm produces coordinated, fuel-efficient, information-rich trajectories while ensuring collision avoidance.