Safe navigation in cluttered and unknown environments remains a significant challenge for differential-drive
unmanned ground vehicles (UGVs). Classical reactive planners exhibit low computational cost but often fail in narrow
passages, while end-to-end learning approaches lack formal safety guarantees. This paper presents a hierarchical naviga-
tion framework for autonomous ground robots with limited onboard sensing, operating in densely cluttered environments.
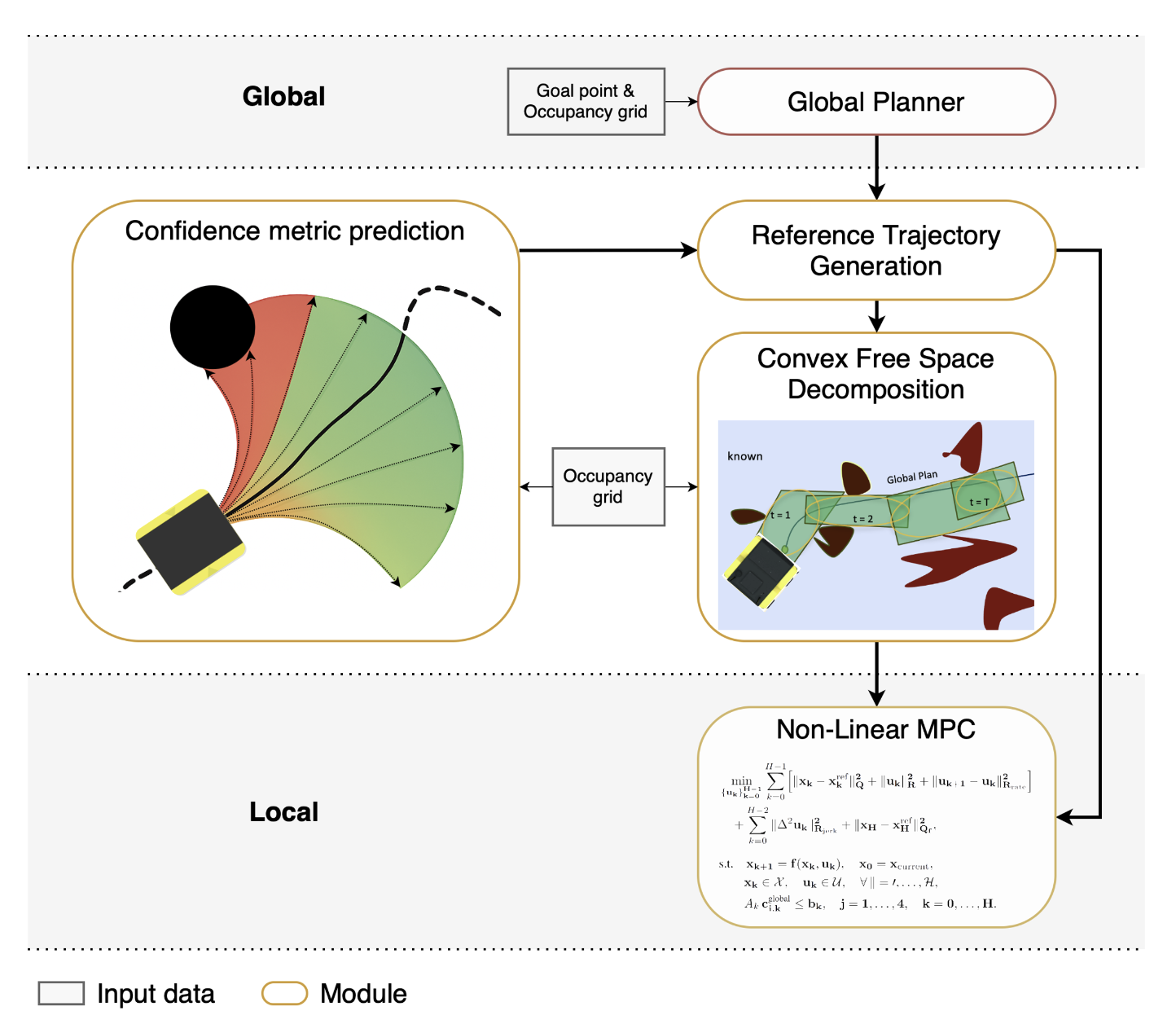
The proposed system integrates a global path planner with a local risk-aware reference trajectory generator and a nonlin-
ear model predictive controller (NMPC) to ensure kinodynamic feasibility, real-time reactivity, and collision avoidance.
A spatio-temporal confidence metric is used to modulate local planning behavior based on environmental complexity.
Convex free-space decomposition around the reference path enables safe corridor construction, ensuring that the robot’s
entire footprint remains within obstacle-free regions. The framework was extensively evaluated in simulation on the
BARN Challenge benchmark, where it achieved higher success rates and superior navigation scores compared to both
classical and learning-based baselines. The results demonstrate the proposed method’s effectiveness in constrained and
complex environments with limited perception.