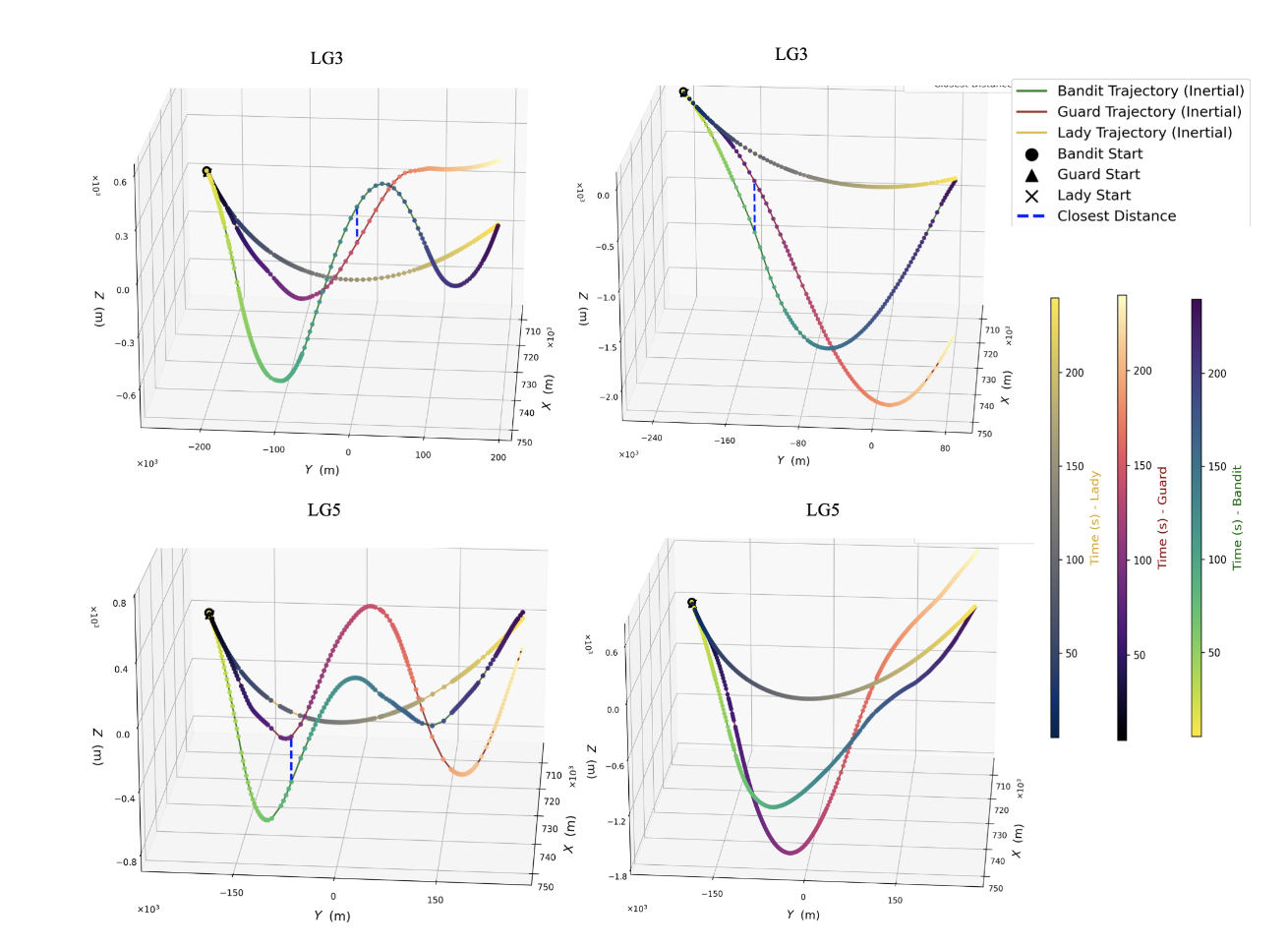
We formulate a three-player Lady-Bandit-Guard scenario where the Bandit attempts to intercept the Lady while avoiding the Guard. The problem uses Clohessy-Wiltshire dynamics in a relative reference frame centered on the Lady.
This paper presents a framework for autonomous planning and control of an attacker (Bandit) in the orbital target guarding game, where the Bandit seeks to capture a target (Lady) while evading interception by a defender (Guard). The challenge lies in computing strategies in a non-cooperative orbital environment, particularly when the defender's strategy is unknown.
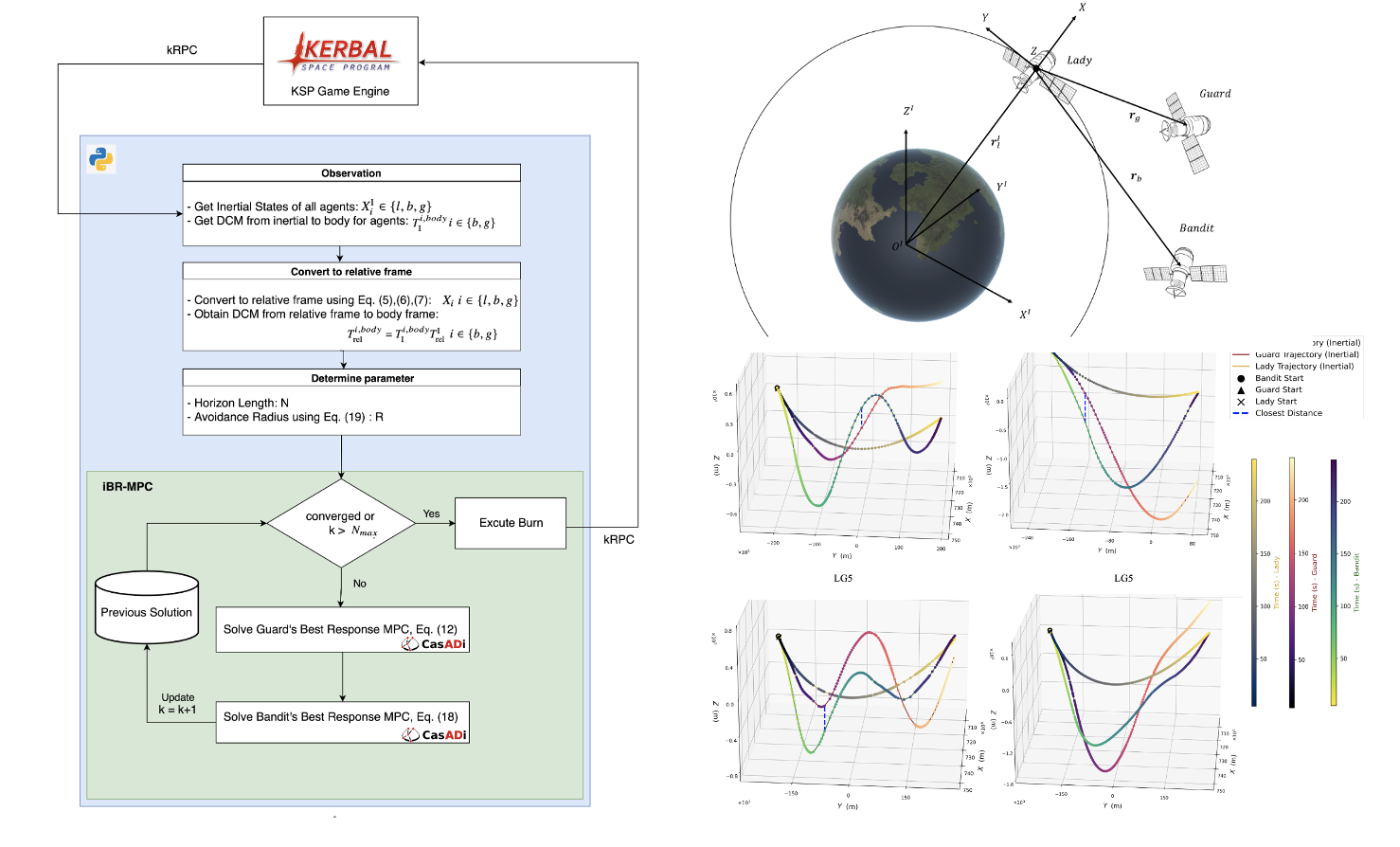
We introduce the Iterative Best Response Model Predictive Control (iBR-MPC) framework, which enables the Bandit to iteratively refine its trajectory based on observed Guard behavior. The algorithm incorporates sensitivity augmentation to dampen oscillations and uses a shrinking-horizon implementation for real-time feasibility. The framework was validated using a Kerbal Space Program-based differential game simulation suite and successfully secured first place in the 2nd Annual AIAA Non-Cooperative Space Operations Challenge.
We formulate a three-player Lady-Bandit-Guard scenario where the Bandit attempts to intercept the Lady while avoiding the Guard. The problem uses Clohessy-Wiltshire dynamics in a relative reference frame centered on the Lady.
The iterative best response algorithm alternates between optimizing Bandit and Guard strategies. Sensitivity augmentation dampens oscillations by incorporating opponent response gradients into each player's cost function.
A shrinking-horizon MPC approach enables real-time operation with adaptive safety constraints. The Guard avoidance distance is dynamically updated based on observed behavior patterns.
The algorithm operates in the Kerbal Space Program Differential Game environment, providing realistic physics-based simulation with continuous time progression during computation.
Demonstration of the iBR-MPC algorithm in action during the AIAA Non-Cooperative Space Operations Challenge, showing the Bandit successfully intercepting the Lady while evading the Guard across different scenarios.
Video will be available upon publication
Lady (blue), Bandit (red), and Guard (green) trajectories across LG3, LG4, and LG5 scenarios
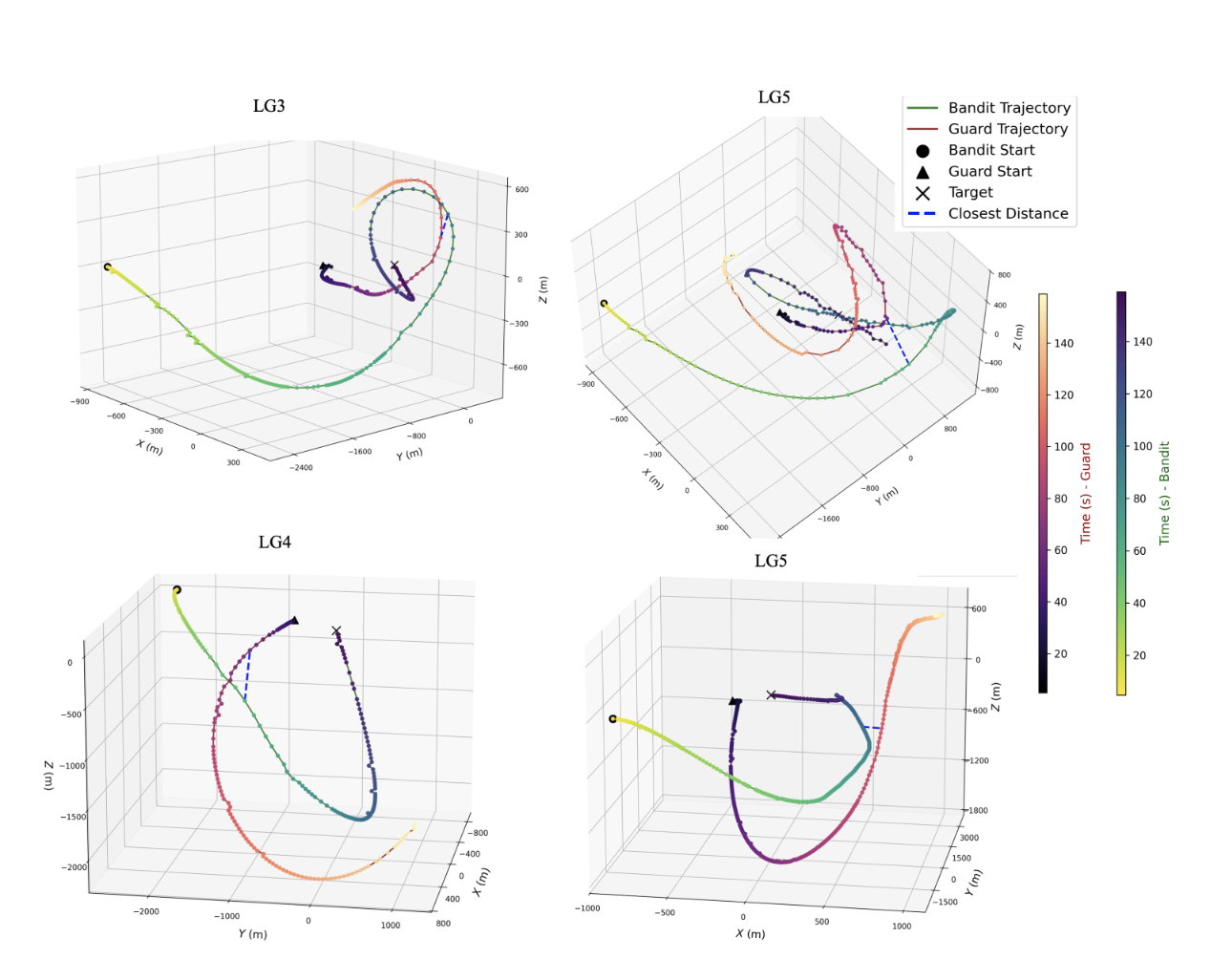
Relative trajectories eliminate inertial effects, showing Bandit-Guard interactions and strategic positioning
| Metric | LG3 | LG4 | LG5 |
|---|---|---|---|
| Closest Lady-Bandit Approach (m) | |||
| Min | 3.0 | 3.4 | 2.9 |
| Max | 17.9 | 13.1 | 19.3 |
| Mean | 5.9 | 6.6 | 11.8 |
| Std Dev | 4.2 | 3.6 | 5.6 |
| Closest Bandit-Guard Approach (m) | |||
| Min | 230.4 | 469.0 | 130.1 |
| Max | 377.6 | 576.4 | 579.2 |
| Mean | 276.0 | 531.6 | 426.4 |
| Std Dev | 39.8 | 32.1 | 119.4 |
| Score | |||
| Min | 2968.8 | 1823.4 | 1992.6 |
| Max | 4362.9 | 2151.7 | 7781.5 |
| Mean | 3739.4 | 1945.1 | 2946.9 |
| Std Dev | 401.6 | 94.8 | 1653.7 |
1st Place • 2nd Annual AIAA Non-Cooperative Space Operations Challenge
Our iBR-MPC framework outperformed all competing methods across three challenging scenarios (LG3, LG4, LG5), demonstrating superior adaptability to unknown opponent strategies in real-time orbital differential games.
AIAA Scitech 2026 • Accepted
This work has been accepted for presentation at the AIAA Science and Technology Forum and Exposition 2026. The research demonstrates breakthrough results in multi-agent orbital differential games with incomplete information.